Лабораторная работа 1-16: Изучение динамики поступательного движения тела с помощью машины Атвуда
Цель работы: изучение динамики поступательного движения тела в поле сил земного тяготения, определение ускорения свободного падения.
Приборы и принадлежности: машина Атвуда, блок электронный ФМ-1/1, набор грузов и перегрузков.
Элементы теории и метод эксперимента
Машина Атвуда используется для изучения законов динамики движения тел в поле земного тяготения. Она представляет собой на- стольный прибор, изображенный на рис. 1.
На вертикальной стойке 1, прикрепленной к основанию 2, расположены два кронштейна: верхний 3 и нижний 4. На верхнем кронштейне крепится легкий блок 5 с узлом подшипников качения, через который перекинута нить 6 с грузами A и B на концах.
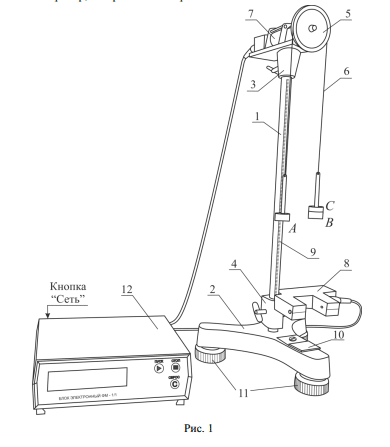
На верхнем кронштейне также находится электромагнит 7, который при подаче на него напряжения с помощью фрикциона удерживает систему с грузами в неподвижном состоянии.
К нижнему кронштейну крепится фотодатчик 8, который выдает электрический сигнал окончания счета времени равноускоренного движения грузов A и B (если на груз B положен перегрузок C). На корпусе фотодатчика имеется горизонтальная риска, указывающая положение его оптической оси.
Нижний кронштейн может свободно перемещаться и фиксироваться на вертикальной стойке 1 по всей ее длине. На вертикальной стойке нанесена миллиметровая шкала 9, по которой определяют начальное и конечное положения груза B, а следовательно, и пройденный путь.
При этом начальное положение груза определяют либо визуально, либо с помощью прямоугольного треугольника по нижнему срезу груза, а конечное положение — по соответствующей метке на фотодатчике. К основанию 2 прикреплена пластина 10 с резиновым амортизатором, гасящим удар груза B при падении.
Основание расположено на трёх регулировочных опорах 11, позволяющих устанавливать стойку 1 в вертикальное положение. Для отсчета времени используется электронный миллисекундомер, который вместе с источником питания электромагнита размещен в электронном блоке 12. Электронный блок питается от сети переменного тока ~220 В.
Принцип работы машины Атвуда заключается в следующем. Если на концах нити висят грузы A и B одинаковой массы M, то система должна находиться в положении безразличного равновесия.
Когда на один из грузов (например, груз B) кладут перегрузок С массы m, то система выходит из положения равновесия и грузы А и B начинают двигаться равноускоренно.
В комплект установки, помимо грузов, входит несколько перегрузков различной массы, что позволяет изучать движение с различными ускорениями.
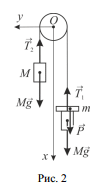
Предположив, что нить и блок невесомы, нить нерастяжима, а сила трения мала, получим закон движения грузов A и B. Выберем неподвижную систему координат, центр которой совмещен с осью блока 5 (рис. 2).
Ось координат Оx направим вниз. В этом случае действующие в системе силы будут направлены вдоль этой оси и не потребуется векторной формы записи основных законов динамики.
На правый груз действуют сила тяжести Mg , сила натяжения нити —T1 и вес перегрузка P.
Согласно второму закону Ньютона
$$Ma=Mg-T_1+P$$
Формула 1
где a – ускорение груза вместе с перегрузком.
На левый груз будут действовать две силы: Mg и —T2 . В силу нерастяжимости нити ускорения обоих грузов равны по абсолютной вели- чине и направлены в противоположные стороны. Тогда из второго закона Ньютона следует, что
$$-Ma=Mg-T_2$$
Формула 2
Так как блок невесом, то равен
$$T_1=T_2$$
Формула 3
Вычитая (2) из (1) с учетом (3), а также считая, что вес перегрузка P = m( g — a) , получаем
$$a=\frac{mg}{2M+m}$$
Формула 4
Из формулы (4) видно, что если M m , то ускорение а существенно меньше g. Именно поэтому его легче определить.
Измеряя пройденный правым грузом путь S и время движения t, можно проверить равноускоренный характер движения груза:
$$S=\frac{at^2}{2}$$
Формула 5
Определение ускорения свободного падения, казалось бы, можно провести на основе формулы (4). Пусть аэ — экспериментальное ускорение, вычисленное из (5). Подставляя аэ в (4), получаем
$$g=\frac{2M+m}{m}a_э$$
Формула 6
Однако вычисление g по формуле (6) и сопоставление его с табличным покажут, что вычисленное и табличное значения g плохо согласуются друг с другом. Такое расхождение связано со следующими причинами.
- Формула (4) получена в предположении, что сила трения мала. На самом деле она составляет заметную долю от величины силы тяжести
- силы, вызывающей движение.
- При выводе формулы (4) также не учитывается момент инерции блока. Его учет приведет к тому, что равенство (3) не будет выполняться, т. е. Т1 ¹ Т2 .
Попробуем учесть теоретически, как эти величины видоизменяют соответствующие формулы для вычисления величин а и g, и опишем методику обработки полученных результатов в каждом опыте.
Для этого рассмотрим вращательное движение блока машины Атвуда. Основной закон динамики вращательного движения тела имеет вид
$$\sum_{i=1}^n M_{zi}=J \epsilon$$
Формула 7
Сумма Mzi — сумма проекций на ось z всех моментов сил, действующих на вращающееся тело; e — его угловое ускорение; J — момент инерции тела.
Направим ось z вдоль оси вращения блока. При движении грузов на блок действуют вращающий момент (T1 — T2 )r и момент силы трения –Mтр. Тогда уравнение (7) примет вид
$$(T_1-T_2)r-M_{тр}=J_б \frac{a}{r}$$
Формула 8
Здесь учтено, что e= a / r , где r — радиус блока, Jб — момент инерции блока. Отметим, что линейное ускорение а крайних точек блока сов- падает по абсолютной величине с ускорением а падающего груза.
Выражая разность T1 — Т2 из уравнений (1) и (2), с учетом веса перегрузка получаем:
$$mr(g-\frac{2M+m}{m}a)-M_{тр}=J_б\frac{a}{r}$$
Формула 9
откуда
$$a=\frac{mgr-M_{тр}}{r(2M+m)+J_б/r}$$
Формула 10
Обозначим через Мб приведённую массу блока
$$M_б=\frac{J_б}{r^2}$$
Формула 11
а через Fтр — приведённую силу трения
$$F_{тр}=\frac{M_{тр}}{r}$$
Формула 12
Учитывая (11) и (12), из (10) получаем
$$a=\frac{mgr-F_{тр}}{2M+m+M_б}$$
Формула 13
Оценки показывают, что Mб<<M, поэтому соотношение (13) можно упростить и привести к виду
$$mg=(2M+m)a+F_{тр}$$
Формула 14
Пусть аэi, аэj— экспериментальные ускорения перегрузков mi и mj соответственно. Подставляя аэi, аэj, mi и mj в соотношение (14), получаем систему
$$\begin{cases} m_ig_э=(2M+m_i)a_{эi}+F_{тр}, \\m_jg_э=(2M+m_j)a_{эj}+F_{тр},\end{cases}$$
Формула 15
где gэ — экспериментальное значение ускорения свободного падения.
Из (15) найдем
$$g_э=\frac{(2M+m_i)a_{эi}-(2M+m_j)a_{эj}}{m_i-m_j}$$
Формула 16
Формула (16) может служить основой для экспериментального оп- ределения ускорения свободного падения.
Подготовка установки к работе
- Убедитесь, что система грузов с нитью, перекинутой через блок, находится в положении безразличного равновесия.
- Если система не находится в положении безразличного равновесия, произведите регулировку положения основания с помощью регулировочных опор, используя для визуального наблюдения в качестве отвесов нить с грузами. При этом необходимо добиться вертикального положения стойки.
- Установите кронштейн с фотодатчиком в нижней части шкалы миллиметровой линейки таким образом, чтобы правый груз при движении проходил посередине рабочего окна фотодатчика.
- Нажмите кнопку «Сеть», расположенную на задней панели электронного блока, при этом должно загореться цифровое табло миллисекундомера.
- Переместите правый груз в верхнее положение и положите на него перегрузок. Убедитесь, что система удерживается фрикционом в положении равновесия.
- Нажмите кнопку «Сброс» миллисекундомера и убедитесь, что на цифровом табло высветились нули.
- Нажмите кнопку «Пуск» миллисекундомера и убедитесь, что система пришла в движение, миллисекундомер отсчитывает время и при пересечении правым грузом оптической оси фотодатчика счет времени прекращается.
Порядок выполнения работы
Для каждого из перегрузков mi, входящих в комплект лаборатор- ной установки, проведите серии опытов в указанном порядке.
- Выберите путь S, который пройдет перегрузок mi в i-м опыте.
- Положите перегрузок mi на правый груз.
- Приведите подвижную систему машины Атвуда в исходное состояние: установите правый груз с перегрузком в крайнее верхнее положение.
- Нажмите кнопку «Сброс» миллисекундомера, при этом должен сработать фрикцион электромагнита и система зафиксируется в заданном положении.
- Перемещая кронштейн с фотодатчиком, установите по шкале миллиметровой линейки путь S как расстояние от нижнего конца верхнего груза до положения метки фотодатчика.
- Нажмите кнопку «Пуск» миллисекундомера и проследите за движением грузов.
- После остановки счета времени запишите показание миллисекундомера в таблицу.
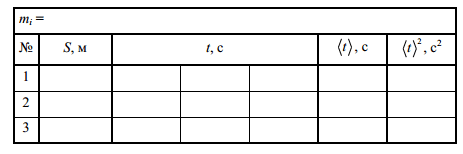
8. Повторите пп. 3 – 7 ещё два раза.
9. Повторите пп. 1 – 8 ещё два раза для различных значений пути S.
Задание 1. Проверка равноускоренного характера движения перегрузков
- Проверьте равноускоренный характер движения перегрузков.
Для каждого перегрузка mi постройте график зависимости S от t 2 .
Ошибки измерений часто приводят к тому, что экспериментальные точки данной зависимости не лежат на одной прямой. Поэтому через точки следует провести «наилучшую прямую», т. е. прямую, проходящую на наименьшем расстоянии от большинства точек.
По угловым коэффициентам ki полученных прямых вычислите ускорения аэi перегрузков: aэi = 2ki .
Задание 2. Определение ускорения свободного падения
- Для каждой пары перегрузков mi и mj определите ускорение свободного падения gэ по формуле (16).
- Оцените абсолютную и относительную погрешности измерения gэ, используя в качестве действительного значения измеряемой величины табличное значение g.
- Для каждого перегрузка mi определите ускорение свободного падения gэ по формуле (6). Сравните полученные значения gэ с табличным значением g, а также с величиной gэ, рассчитанной по формуле (16). Сделайте выводы о точности определения ускорения свободного падения.
Вопросы и задания для самоконтроля
-
Сформулируйте и дайте обоснование основных законов динамики поступательного движения.
.
-
Дайте определения массы, силы, пути, перемещения, скорости, средней скорости, ускорения.
.
-
В чем заключается проверка основного закона динамики поступательного движения с помощью машины Атвуда?
.
-
Какие силы действуют на движущиеся тела в машине Атвуда?
.
-
Сформулируйте основной закон динамики вращательного движения.
.
-
Дайте определения момента инерции материальной точки, тела; момента силы относительно оси; угловой скорости; углового ускорения.
.
Библиографический список
- Савельев И.В. Курс физики: учебник. Том 1: Механика. Молекулярная физика. М.: Лань, 2008, 4-е изд., стереотип. 354 с.
- Детлаф А.А., Яворский Б.М. Курс физики: учеб. пособие для вузов. М.: Академия, 2009, 8-е изд., стереотип. 720 с.
- Трофимова Т.И. Курс физики: учеб. пособие для вузов. М.: Академия, 2010, 18-е изд., стереотип. 560 с.
УДК 537.226.4
Изучение динамики поступательного движения тела с помощью машины Атвуда / Рязанский государственный радиотехнический университет; cост.: М.А. Буробин. Рязань, 2012. 8 с.
Содержат основные теоретические сведения, порядок выполнения работы и итоговые контрольные вопросы.
Предназначены для студентов всех направлений подготовки бакалавров и специальностей, изучающих дисциплину «Физика».
Табл. 1. Ил. 2. Библиогр.: 3 назв.
Машина Атвуда, ускорение, равноускоренное движение, ускорение свободного падения
Печатается по решению редакционно-издательского совета Рязанского государственного радиотехнического университета.
Рецензент: кафедра общей и экспериментальной физики РГРТУ (зав. кафедрой доц. М.В. Дубков)
Изучение динамики поступательного движения тела с помощью машины Атвуда
Составитель: Буробин Михаил Анатольевич
Редактор Р.К. Мангутова Корректор С.В. Макушина
Подписано в печать 20.04.12. Формат бумаги 60 × 84 1/16.
Бумага газетная. Печать трафаретная. Усл. печ. л. 0,5.
Тираж 200 экз. Заказ
Рязанский государственный радиотехнический университет.
390005, Рязань, ул. Гагарина, 59/1.
Редакционно-издательский центр РГРТУ.